We’re more than halfway done with our 2.5-year ADS for Rural America project. This U.S. DOT-funded demonstration project is testing the use of automated driving technologies on rural roadways to examine and understand the unique needs of rural environments, while working toward solutions that improve safety and mobility.

Lessons learned so far
Development of any new technology involves (really, requires) lessons learned along the way. Many of these lessons will be explored further in the remaining project phases. Here are some of those lessons learned so far:
- Training and communication are imperative.
- Clearly define the roles for all team members.
- On-site staff should be trained to troubleshoot simpler issues.
- Close communication with technology provider is essential.
- Safety drivers need to have extensive experience and be intimately familiar with the operational design domain.
- Conservative automation behavior is the norm.
- To have a vehicle drive autonomously at 65 mph in live traffic is a big deal. It took a lot of testing to raise it from the initial 50 mph max speed.
- Automation behavior is conservative for good reason (i.e., safety), but this means the vehicle is often very slow to start moving from stop signs and railroad crossings (at times to the frustration of drivers behind us).
- Automation doesn't adapt to poor weather conditions.
- The automation does not slow the vehicle for poor weather, slick surface conditions, or snow build-up on the road.
- Icy weather impacts sensor performance and can essentially blind the LiDAR. The first photo shows the ice build-up on the LiDAR, and the resulting LiDAR point cloud is shown below.

Ice build-up on LiDAR 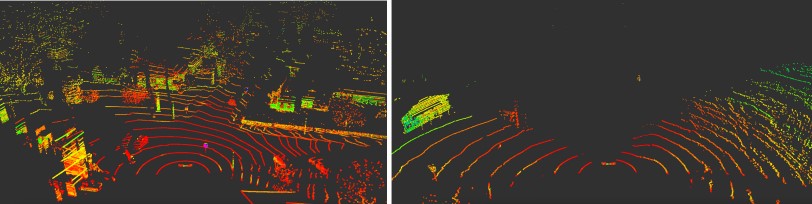
Clear LiDAR at the beginning of the drive (left) vs. ice-covered LiDAR (right)
- Automation behaviors don't adapt well to rural roads.
- The vehicle travels at the speed limit programmed into the HD map, regardless of approaching a blind corner or hill. Virtual speed limits must be added to the HD map to slow the vehicle down at these specific locations.
- On a narrow gravel road, humans drive near the center to avoid the edge of the road, where there can be looser gravel and steep drop-offs (unless approaching another vehicle or blind hill/corner, then they move over). The automation is currently being fine-tuned to reflect the way humans drive on gravel roads.
- The vehicle may not be able to classify all objects and has slowed for:
- Water spray from a lawn sprinkler.
- Dust clouds (on a gravel road).
- The video below shows dust from a passing vehicle and how the LiDAR perceived that dust cloud, below that. The vehicle proceeded to slow to a stop.
- Camera-based approach to identifying traffic signals has its pros and cons:
- Pros: Cameras allow you to pick up the state of signal heads without any changes to physical infrastructure.
- Cons: There is a potential to pick up the wrong signal head from an adjacent lane, and the view can be blocked if behind a tall vehicle or near sharp elevation changes.
Learn more, subscribe to our newsletter, and watch our past webinars at ADSforRuralAmerica.uiowa.edu.